Depth estimation from a single input image is still an open challenge, physical cues introduced by the camera optics such as blur can be laveraged to estimate depth maps using conventional as well as aperture-engineered imaging devices.
Key research topics include:
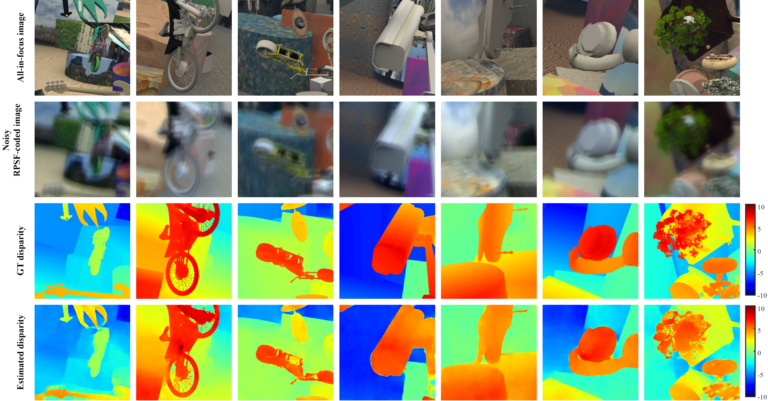
- Depth Estimation from Rotating Point Spread Function (RPSF) data.
- Color image recovery from RPSF blurred data.
- Deep Learning for joint depth estimation and optics design.
Selected publications:
End-to-end learning for joint depth and image reconstruction from diffracted rotation Journal Article
In: arXiv preprint arXiv:2204.07076, 2022.